大家好,小弟上來野人獻曝一下,在此公開個人製作"彎曲傳感手套"的全部過程,希望對有興趣的同好有所幫助,以下影片內容是預計填寫的各章節簡介與製作完成後的展示影片:
[Youtube]https://www.youtube.com/watch?v=kMfHDuT-jzg&t=8s&index=6&list=PLQOz6RrNZk7W2_bMIecxzgzHHGooVZw9e[/Youtube]
下面開始第一篇的教學說明,敬請不吝指教:
=============================================================================
【前言】 人機介面或稱人機互動(Human-Machine Interface;HMI)是一門非常深奧的領域,其專業範圍跨足多項科技領域,何謂人機介面?簡單的解釋就是在人與機器之間,透過某種介面,讓人們可以對機器下達指令,然後機器也能夠透過此介面將執行狀況或結果回報給使用者,好的人機介面除了可以降低人們對機器的學習曲線外,還能在機器使用中達到保護操作人員安全的作用,這也是今天我們所要製作的"彎曲傳感手套"的發想初終,藉由人類最熟習的雙手直覺的與機器互動,因該是最理想化的輸入方式,話止與此接下來就一步一步的說明如何製作"彎曲傳感手套",也期望大家能在了解原理後可以精進或改良這個技術,並使用這個技術創造出更多有趣的應用。 【準備材料】單向彎曲傳感器 X 5 Arduino NANO X 1 迷你170孔麵包板 X 1 杜邦線-公對公 X 20 杜邦線-公對母 X 20 10kΩ電阻 X 5 手套 X 1 熱縮套管 些許 透明膠帶 X1 25mm大頭針 X1 3M超強力雙面膠 X1
【準備工具】【使用軟體】【程式下載】【電路圖】【製作方法】Step 1:將公對公杜邦線插入單向彎曲傳感器並焊上少許焊錫,如下圖:
Step 2:在焊處套上熱縮套管,如下圖:

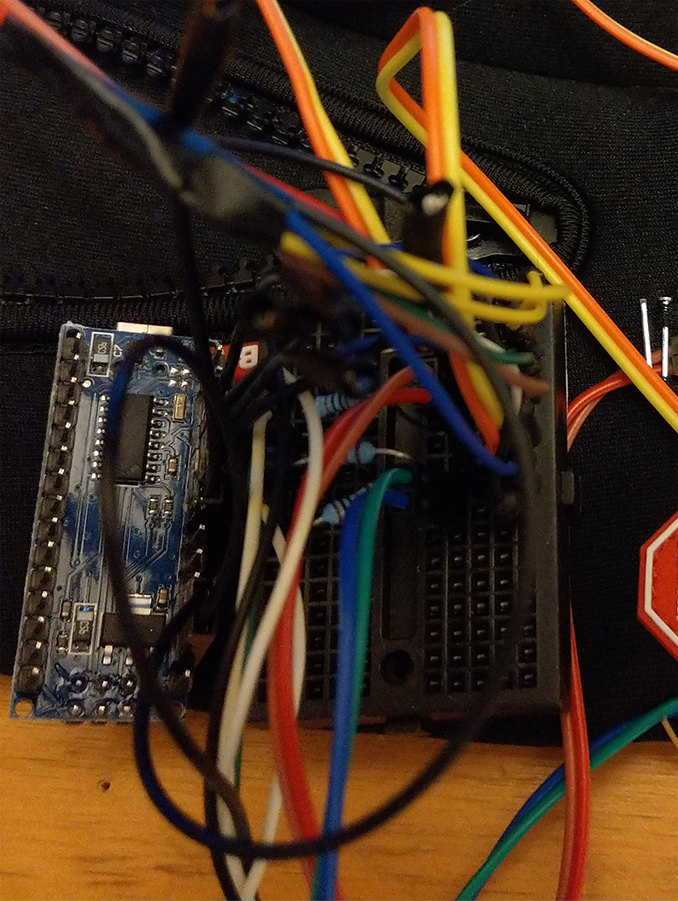
Step 3:參考電路圖將所有元件與電線插入麵包版上,如下圖:
Step 4:請將從GitHub下載的檔案解壓縮並使用Arduino軟體開啟位於[Tutorials_1\Arduino\CurvedSensingGlovesTutorial_1\CurvedSensingGlovesTutorial_1.ino]的檔案,程式碼說明如下: #define PIN_THUMB A0 // 拇指.
#define PIN_POINTER A1 // 食指.
#define PIN_MIDDLE A2 // 中指.
#define PIN_RING A3 // 無名指.
#define PIN_LITTLE A4 // 小指.
// 拇指數值.
int thumbValue = 0;
// 食指數值.
int pointerValue = 0;
// 中指數值.
int middleValue = 0;
// 無名指數值.
int ringValue = 0;
// 小指數值.
int littleValue = 0;
String str = "";
//-------------------------------------------------------
// 初始.
//-------------------------------------------------------
void setup() {
Serial.begin(9600);
}
//-------------------------------------------------------
// 主迴圈.
//-------------------------------------------------------
void loop() {
// 拇指數值.
thumbValue = analogRead(PIN_THUMB);
// 食指數值.
pointerValue = analogRead(PIN_POINTER);
// 中指數值.
middleValue = analogRead(PIN_MIDDLE);
// 無名指數值.
ringValue = analogRead(PIN_RING);
// 小指數值.
littleValue = analogRead(PIN_LITTLE);
// 顯示手指各部分訊息(拇指數值|食指數值|中指數值|無名指數值|小指數值|)
str = (String)thumbValue + "|" + (String)pointerValue + "|" + (String)middleValue + "|" + (String)ringValue + "|" + (String)littleValue + "|";
Serial.println(str);
delay(100);
} |


Step 5:建議在所有電子零件跟單向彎曲傳感器測試都正常後才執行以下動作,不然等將所有電子零件固定到手套後才發現零件有問題,然後要在拆開來替換或調整就會比較麻煩了,以下繼續將所有單向彎曲傳感器固定到手套上,如下圖:
 
【後記】下一篇教學我們將繼續讓傳感手套擺脫USB線的束縛,透過Bluetooth無線傳輸來傳接收資料,那就下次見囉
| 





 發表於 2018-9-22 17:48
發表於 2018-9-22 17:48





 收藏
收藏 LIKE
LIKE 反對
反對

